
Serie TBoat
Vehículo de superficie no tripulado
Los vehículos de superficie no tripulados de la serie TBoat son sistemas muy versátiles que satisfacen más de 99% de las necesidades de la industria acuática. Están diseñados con un alto grado de automatización y una gran resistencia a las perturbaciones, y cuentan con un casco ampliable que admite diversos equipos, como ecosondas, sonares de barrido lateral y sensores de calidad del agua. Sus aplicaciones abarcan desde la cartografía topográfica submarina hasta el control de la calidad del agua y la vigilancia medioambiental. Esta solución de “un buque para múltiples aplicaciones” mejora considerablemente la eficacia y precisión de las operaciones acuáticas no tripuladas.

Serie TBoat
Vehículo de superficie no tripulado
La serie TBoat de vehículos de superficie no tripulados es un sistema muy versátil que satisface más de 99% de las demandas de la industria acuática.Diseñada con un alto grado de automatización y una gran resistencia a las perturbaciones, la serie cuenta con un casco ampliable compatible con una amplia gama de equipos, como ecosondas, sonares de barrido lateral y sensores de calidad del agua.En términos de despliegue práctico, sus casos de uso abarcan desde la cartografía topográfica submarina hasta el control de la calidad del agua y la vigilancia medioambiental.Como resultado, esta solución de “un buque para múltiples aplicaciones” mejora enormemente la eficacia y precisión de las operaciones acuáticas no tripuladas.
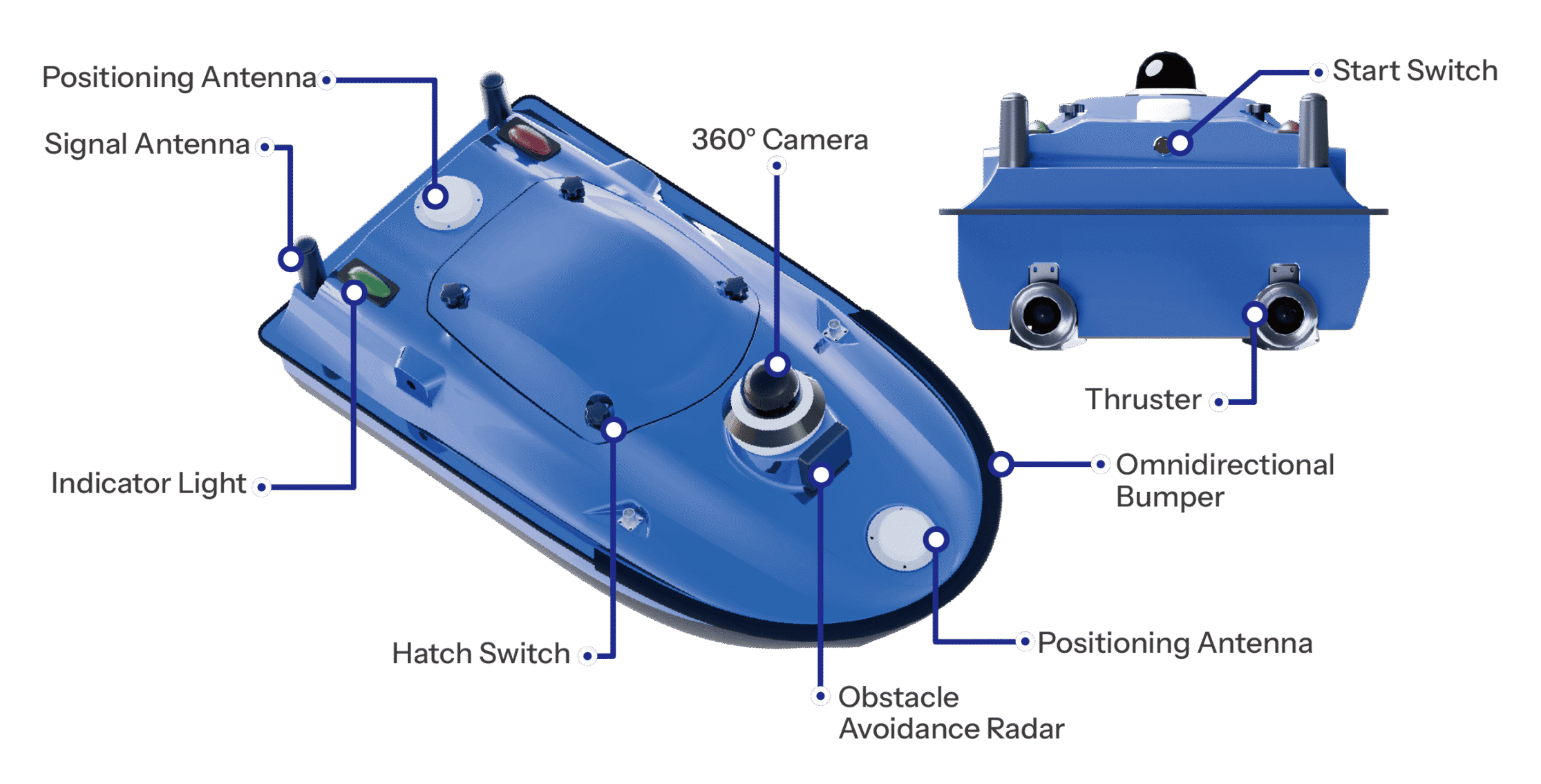
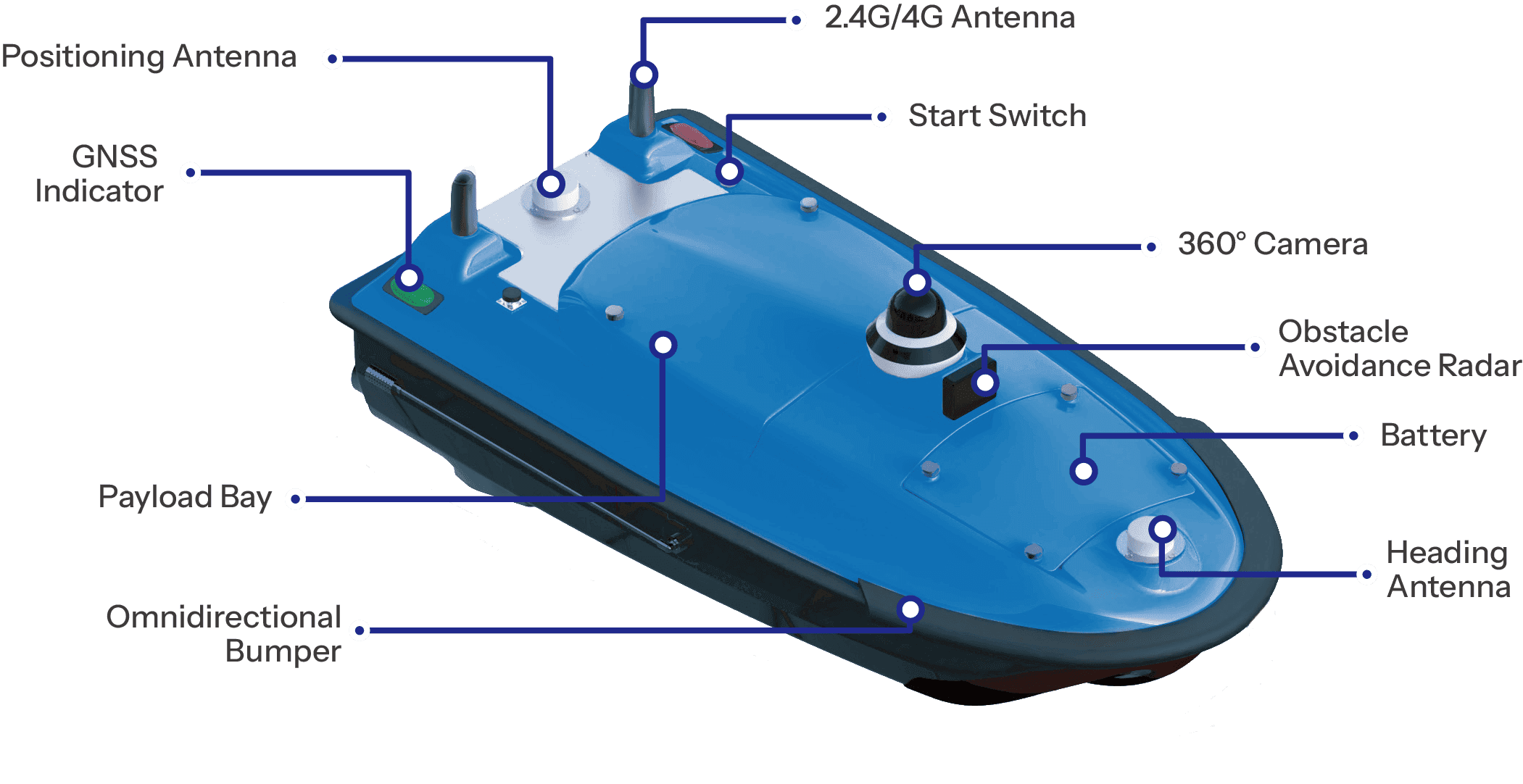
Arquitectura del sistema
Área de aplicación

TBoat10-A
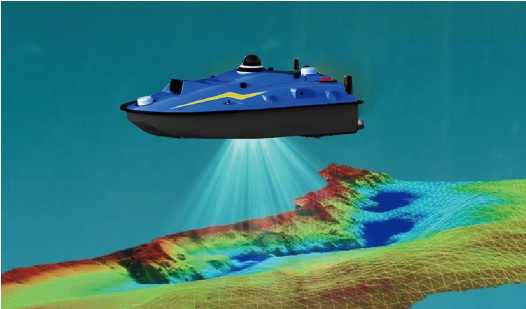
Estudio batimétrico

TBoat10-B
Control de la calidad del agua

TBoat10-C
Muestreo de la calidad del agua
TBoat10-D
USV de patrulla con sonar de barrido lateral
Arquitectura del sistema
Área de aplicación
TBoat20-A
Estudio batimétrico
TBoat20-B
Control de la calidad del agua
TBoat20-C
Muestreo de la calidad del agua
TBoat20-D
USV de patrulla con sonar de barrido lateral

TBoat20-E
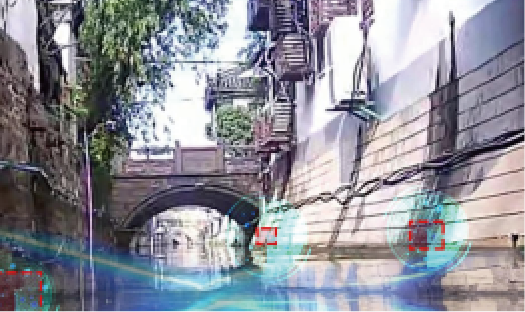
Inspección de la superficie del agua
TBoat20-F
Topografía submarina
Arquitectura del sistema
Área de aplicación
TBoat10-A
Estudio batimétrico
TBoat10-B
Control de la calidad del agua
TBoat10-C
Muestreo de la calidad del agua
TBoat10-D
USV de patrulla con sonar de barrido lateral
Arquitectura del sistema
Área de aplicación
TBoat20-A
Estudio batimétrico
TBoat20-B
Control de la calidad del agua
TBoat20-C
Muestreo de la calidad del agua
TBoat20-D
USV de patrulla con sonar de barrido lateral
TBoat20-E
Inspección de la superficie del agua
TBoat20-F
Topografía submarina
Parámetros de hardware
Casco
980*520*254mm(TBoat10)
1280*580*430mm(TBoat20)
Casco: 7kg, Total: 30kg(TBoat10)
Casco: 12kg, Total: 40kg(TBoat20)
Mando a distancia
Potencia
Potencia nominal 1200W(TBoat20)

Velocidad nominal 7000 RPM(TBoat20)
33,6V 30Ah*2(TBoat20)
Medición de la profundidad
(Alcance ampliado disponible como opción)