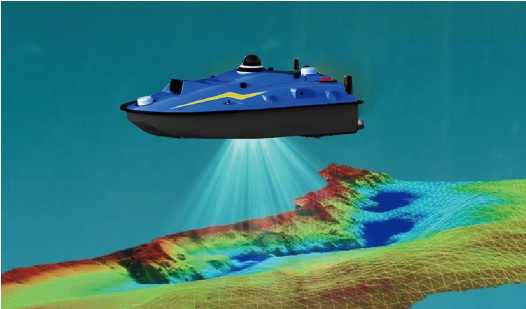
Die unbemannten Oberflächenfahrzeuge der TBoat-Serie sind äußerst vielseitige Systeme, die mehr als 99% der Anforderungen der Wasserwirtschaft erfüllen. Sie sind mit einem hohen Automatisierungsgrad und einer hohen Störungsresistenz ausgestattet und verfügen über einen erweiterbaren Rumpf, der verschiedene Geräte wie Echolote, Side-Scan-Sonare und Wasserqualitätssensoren aufnehmen kann. Ihre Einsatzmöglichkeiten reichen von der topografischen Unterwasserkartierung bis hin zur Überwachung der Wasserqualität und Umweltvermessung. Diese “ein Schiff für mehrere Anwendungen”-Lösung steigert die Effizienz und Präzision unbemannter Wasseroperationen erheblich.
TBoat-Serie
Unbemanntes Oberflächenfahrzeug
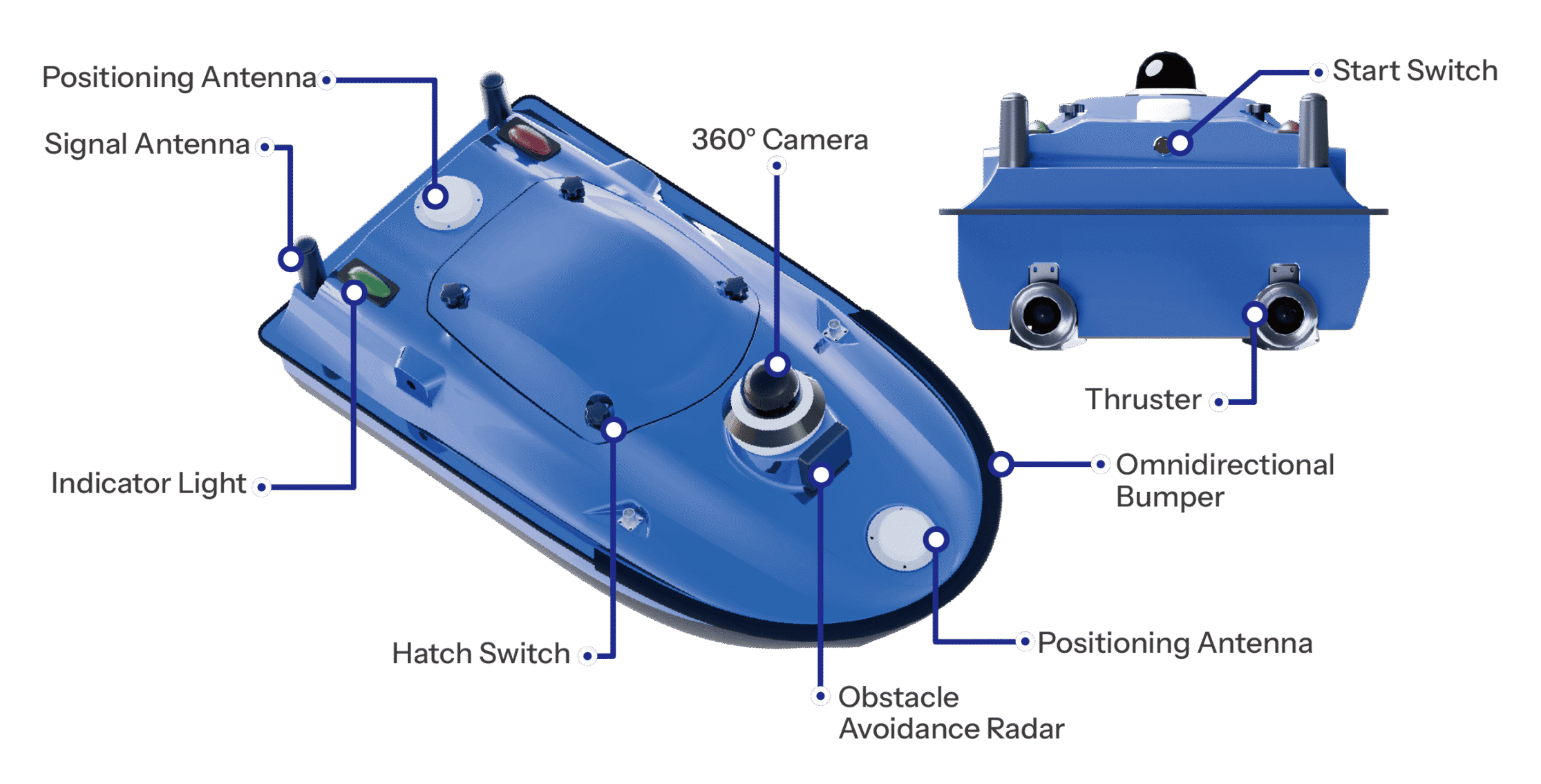
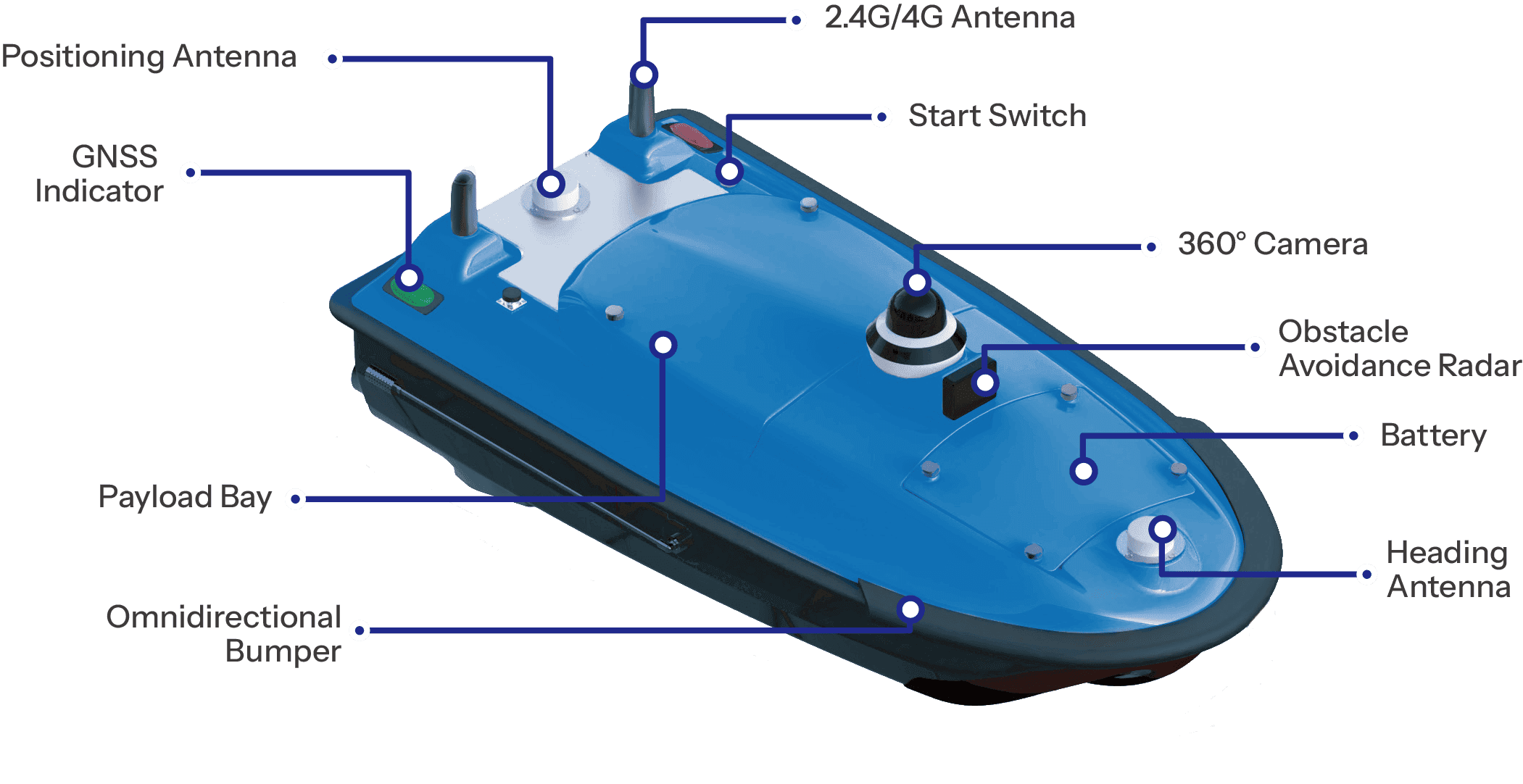
Die TBoat-Serie unbemannter Oberflächenfahrzeuge ist ein äußerst vielseitiges System, das mehr als 99% der Anforderungen der Wasserindustrie erfüllt. Die Serie wurde mit einem hohen Automatisierungsgrad und einer hohen Störungsresistenz entwickelt und verfügt über einen erweiterbaren Rumpf, der mit einer breiten Palette von Geräten wie Echoloten, Seitensichtgeräten und Wasserqualitätssensoren kompatibel ist.
Mit einer bewährten Erfolgsbilanz in der Vermessungsbranche suchen wir jetzt nach leidenschaftlichen Vertriebsmitarbeitern, die an unserer globalen Erfolgsgeschichte teilhaben möchten.